Depth-First Search and Breadth-First Search in Python
Graph theory and, in particular, the graph ADT (abstract data type) is widely explored and implemented in the field of Computer Science and Mathematics. Consisting of vertices (nodes) and the edges (optionally directed or weighted) that connect them, the data structure is effectively able to represent and solve many problem domains. One of the most popular areas of algorithm design within this space is the problem of checking for the existence of, or the (shortest) path between, two or more vertices in the graph. Properties such as edge weighting and direction are two factors that the algorithm designer can take into consideration. In this post I will be exploring two of the simpler available algorithms, depth-first and breadth-first search, to achieve the goals highlighted below:
- Find all vertices in a subject vertex’s connected component.
- Return all available paths between two vertices.
- And, in the case of BFS, return the shortest path (with length measured by the number of path edges).
The Graph
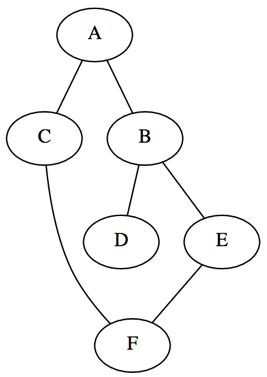
So as to clearly discuss each algorithm, I have crafted a connected graph with six vertices and six incident edges. The resulting graph is undirected with no assigned edge weightings, as length will be evaluated based on the number of path edges traversed. There are two popular options for representing a graph: the first is an adjacency matrix (effective with dense graphs) and the second is an adjacency list (effective with sparse graphs). I have opted to implement an adjacency list which stores each node in a dictionary along with a set containing its adjacent nodes. As the graph is undirected, each edge is stored in both incident nodes’ adjacent sets.
graph = {'A': set(['B', 'C']),
'B': set(['A', 'D', 'E']),
'C': set(['A', 'F']),
'D': set(['B']),
'E': set(['B', 'F']),
'F': set(['C', 'E'])}
Looking at the graph depiction below, you will also notice the inclusion of a cycle, by the adjacent connections between ‘F’ and ‘C/E’. This has been purposely included to provide the algorithms with the option to return multiple paths between two desired nodes.
Depth-First Search
The first algorithm I will be discussing is depth-first search, which, as the name hints, explores possible vertices (from a supplied root) down each branch before backtracking. This property allows the algorithm to be implemented succinctly in both iterative and recursive forms. Below is a listing of the actions performed upon each visit to a node:
- Mark the current vertex as visited.
- Explore each adjacent vertex that is not included in the visited set.
Connected Component
The implementation below uses the stack data structure to build up and return a set of vertices that are accessible within the subject’s connected component. Using Python’s overloading of the subtraction operator to remove items from a set, we are able to add only the unvisited adjacent vertices.
def dfs(graph, start):
visited, stack = set(), [start]
while stack:
vertex = stack.pop()
if vertex not in visited:
visited.add(vertex)
stack.extend(graph[vertex] - visited)
return visited
dfs(graph, 'A') # {'E', 'D', 'F', 'A', 'C', 'B'}
The second implementation provides the same functionality as the first; however, this time we are using the more succinct recursive form. Due to a common Python gotcha with default parameter values being created only once, we are required to create a new visited set on each user invocation. Another Python language detail is that function variables are passed by reference, resulting in the visited mutable set not having to be reassigned upon each recursive call.
def dfs(graph, start, visited=None):
if visited is None:
visited = set()
visited.add(start)
for next in graph[start] - visited:
dfs(graph, next, visited)
return visited
dfs(graph, 'C') # {'E', 'D', 'F', 'A', 'C', 'B'}
Paths
We are able to tweak both of the previous implementations to return all possible paths between a start and goal vertex. The implementation below uses the stack data structure again to iteratively solve the problem, yielding each possible path when we locate the goal. Using a generator allows the user to compute only the desired number of alternative paths.
def dfs_paths(graph, start, goal):
stack = [(start, [start])]
while stack:
(vertex, path) = stack.pop()
for next in graph[vertex] - set(path):
if next == goal:
yield path + [next]
else:
stack.append((next, path + [next]))
list(dfs_paths(graph, 'A', 'F')) # [['A', 'C', 'F'], ['A', 'B', 'E', 'F']]
The implementation below uses the recursive approach, calling the ‘yield from’ PEP 380 addition to return the located paths. Unfortunately, the version of Pygments installed on the server at this time does not include the updated keyword combination.
def dfs_paths(graph, start, goal, path=None):
if path is None:
path = [start]
if start == goal:
yield path
for next in graph[start] - set(path):
yield from dfs_paths(graph, next, goal, path + [next])
list(dfs_paths(graph, 'C', 'F')) # [['C', 'F'], ['C', 'A', 'B', 'E', 'F']]
Breadth-First Search
An alternative algorithm called breadth-first search provides us with the ability to return the same results as DFS, but with the added guarantee of returning the shortest path first. This algorithm is a little more tricky to implement in a recursive manner; instead, using the queue data structure is preferable, as such I will only be documenting the iterative approach. The actions performed per each explored vertex are the same as the depth-first implementation, however, replacing the stack with a queue will instead explore the breadth of a vertex’s depth before moving on. This behaviour guarantees that the first path located is one of the shortest paths present, based on the number of edges being the cost factor.
Connected Component
Similar to the iterative DFS implementation, the only alteration required is to remove the next item from the beginning of the list structure instead of the stack’s last item.
def bfs(graph, start):
visited, queue = set(), [start]
while queue:
vertex = queue.pop(0)
if vertex not in visited:
visited.add(vertex)
queue.extend(graph[vertex] - visited)
return visited
bfs(graph, 'A') # {'B', 'C', 'A', 'F', 'D', 'E'}
Paths
This implementation can again be altered slightly to instead return all possible paths between two vertices, the first of which is one of the shortest such paths.
def bfs_paths(graph, start, goal):
queue = [(start, [start])]
while queue:
(vertex, path) = queue.pop(0)
for next in graph[vertex] - set(path):
if next == goal:
yield path + [next]
else:
queue.append((next, path + [next]))
list(bfs_paths(graph, 'A', 'F')) # [['A', 'C', 'F'], ['A', 'B', 'E', 'F']]
Knowing that the shortest path will be returned first from the BFS path generator method, we can create a useful method which simply returns the shortest path found, or ‘None’ if no path exists. As we are using a generator, this in theory should provide similar performance results to just breaking out and returning the first matching path in the BFS implementation.
def shortest_path(graph, start, goal):
try:
return next(bfs_paths(graph, start, goal))
except StopIteration:
return None
shortest_path(graph, 'A', 'F') # ['A', 'C', 'F']